3Dカメラ × 協働ロボ × Jetson × Claude Code で参入する『500万円ロボSI』の最小構成
3Dカメラ × 協働ロボ × Jetson × Claude Code で参入する『500万円ロボSI』の最小構成
「3Dカメラと協働ロボとJetsonを組み合わせて、検知と軌跡生成のパッケージを500万円前後で売っている会社がある。買い手は自分で組めないからほぼ言い値で買う。分かりやすい言葉で親身に対応するだけで案件が決まる」——現場でそう聞いた話を起点に、Claude Codeを使いこなす小規模SIerが最短で参入するための最小構成を、一次ソース中心に調べ直した結果をまとめる。
本記事は2026年6月5日時点のディープリサーチをもとに構成している。著者自身がSI案件を回しているわけではなく、公開情報と現場観察を突き合わせた仮説整理。価格・仕様は時期や為替で動くため、最終的な選定時は各メーカー一次資料を確認すること。
0. そもそもこれで何ができるのか
技術詳細に入る前に、具体的に何ができる装置なのかを置いておく。一言で言うと「目のついた腕を売る」ことができる。
これまでロボは「決まった位置にある決まったモノを、決まった動きで」しか触れなかった。3Dカメラで「ワークがどこにどんな向きであるか」を見て、Jetsonで「どう動けば掴めるか」を計算するから、位置がブレるモノ、種類が混ざるモノ、毎回少しずつ違うモノを触れるようになる。

↑ 大規模工場では Mujin のような全自動バラ積みピッキング装置が稼働している(写真出典: Mujin 公式)。500万円SIが狙うのは、こうした大規模装置が入らない「もっと小さい現場」「単一ワーク」「日次少量」のところ。
0.1 具体ユースケース(現場イメージ付き)
弁当・惣菜工場のおかず盛り付け
唐揚げ・卵焼き・ブロッコリーがバラバラに流れてくるコンベアから、種類ごとに1個ずつ掴んで弁当箱に置く。いまは深夜にパートさん10人で回している作業。
段ボール/コンテナのパレタイズ・デパレタイズ
パレットに乱雑に積まれたサイズの違う段ボールを、自動で1個ずつ降ろしてベルトに乗せる。物流倉庫・卸の入荷側で人手不足が深刻な作業。
金属加工後のワーク並べ替え
旋盤やプレスから出てきたワークがカゴにバラバラに入っている状態から、検査機にきれいに並べる。バリ取り・洗浄の後工程の「人を置くしかなかった」ところ。
既存ティーチング型ロボに「目」を後付け
すでに動いているロボ(ファナック・三菱・川崎)に、3Dカメラだけ追加してワーク位置のズレを補正する。ライン全体を作り直さず、500万円で歩留まりが上がる(チョコ停が減る)。
多品種少量の組立補助
ネジ・コネクタ・小部品を部品箱の中から1個ずつ掴んで作業台に出す。多品種少量で「専用治具を作るほどじゃないが人が回らない」工程。
化粧品・医薬品のブリスター/箱詰め検査
不良品を見つけて掴んでハネるまで一気通貫。検査機(カメラだけ)とロボ(掴むだけ)を別々に買うより安く済む。
食品/3K現場の単純反復作業
冷凍庫の中、油の周り、粉塵のある場所など人がやりたがらない反復作業。高齢化で人が確保できない地方の中小工場で、装置1台で1〜2人分のシフトが空く。
0.2 一言で言うなら
「いまパートさんが立って繰り返している、見て掴んで置くだけの作業」を、500万円で自動化する装置。Mujinが入る大企業の自動化(数千万円〜数億円)とは別の、社員30人以下の町工場・食品工場・物流現場が買える価格帯。
税理士・会計士の感覚で言うと、「人件費年300万円のパートさんを1人雇うか、500万円(補助金で実質200万円)の装置を入れるか」の選択肢を客先に提示できる商品。補助金が乗れば1.5年でペイする計算になる。
ここから先は、上のユースケースを実現するためのハードウェア選定・ソフトウェアスタック・PoC構成・補助金活用を、一次資料の引用付きで掘り下げる。
1. 全体像と500万円の内訳
最初に、500万円のパッケージが何で構成されるかをざっくり置いておく。後段で個別に深掘りする。
| 区分 | 構成 | 想定原価レンジ |
|---|---|---|
| ロボ本体 | 中国系協働ロボ(JAKA/Fairino/Dobot)または可搬3-5kg級UR | 80〜180万円 |
| 3Dカメラ | RealSense D435i / OAK-D Pro / Orbbec Gemini系 | 5〜25万円 |
| エンドエフェクタ | 真空パッド/平行ハンド + ガス・電空 | 10〜30万円 |
| エッジ計算 | Jetson Orin Nano/NX + ストレージ + 電源 | 8〜20万円 |
| 制御PC・産業用筐体 | 制御盤、安全PLC、配線、ペンダント周り | 30〜60万円 |
| 架台・治具・安全柵 | レーザースキャナ or エリアセンサ含む | 20〜80万円 |
| ソフトウェアSI工数 | ROS 2/MoveIt統合、検知モデル、UI、現場調整 | 100〜200万円 |
| 据付・立ち合い・教育 | 出張費・現地調整・運用引き渡し | 30〜80万円 |
| 予備費・保証 | 故障時切り戻し用、初期消耗品 | 20〜50万円 |
ハード合計が180〜350万円、SI工数と据付で150〜300万円、合計400〜600万円のレンジに収まる。ハイエンドカメラ(Photoneo / Zivid / Mech-Eye)を入れると即500万円を突破するので、500万円パッケージで戦うならボリュームゾーンは「中国系コボット + コンシューマ系3Dカメラ + Jetson + ROS 2/cuMotion」の組み合わせになる。
2. 3Dカメラ(市販品)の選び方
2.1 ボリュームゾーンの主役: Intel RealSense D435i

↑ Intel RealSense D435i。手のひらサイズで実勢7万円前後。机上のピック&プレース・近距離6Dポーズ推定の主力カメラ(画像出典: Intel RealSense AI 公式)。
Intel公式(realsenseai.com)によると、D435iは
- Depth FOV: 87° × 58°
- 解像度: 最大1280×720、最大90fps
- 推奨depth range: 0.3〜3m
- 用途として「ロボットナビゲーション・物体認識・SLAM・トラッキング」を明示
- IMU内蔵(D435との差分)
机上のピック&プレースや近距離の6Dポーズ推定はこの範囲にきれいに収まる。ROS 2公式ドライバrealsense-rosが成熟しており、Pythonでもpyrealsense2で叩ける。500万円SIの主役カメラとしてはこれが第一候補。実勢7万円前後で在庫もあるため、PoCの段階でも複数台持てる。
2.2 ステレオ+VPU内蔵で軽い: Luxonis OAK-D Pro / OAK-D-W-PoE

↑ Luxonis OAK-D Pro。カメラ本体にVPUを内蔵し、YOLO推論までカメラ側で完結する(画像出典: Luxonis Shop)。
OAK-DはMyriad XベースのVPUを内蔵し、カメラ側でYOLO推論まで走る。Jetson側のGPU負荷を下げたいときに刺さる。PoE版は配線1本で給電もできるため、装置内配線が綺麗にまとまる。価格はおおむね5〜12万円。屋内・固定設置のケースで第二候補に置く価値がある。
2.3 Azure Kinect 後継のOrbbec系
Microsoft Azure Kinect生産終了後、Orbbecが正式に後継ライセンスを取得し、ToF系のFemto Boltや構造化光のGemini 2を出している。屋内シーンの広FOVが必要な場合(パレタイズ・デパレタイズ等)に検討する。比較記事(openelab.io)でも、Gemini 2はD435よりやや広視野・近距離特化と整理されている。
2.4 産業用ハイエンド: Photoneo MotionCam-3D / PhoXi、Zivid Two、Mech-Eye
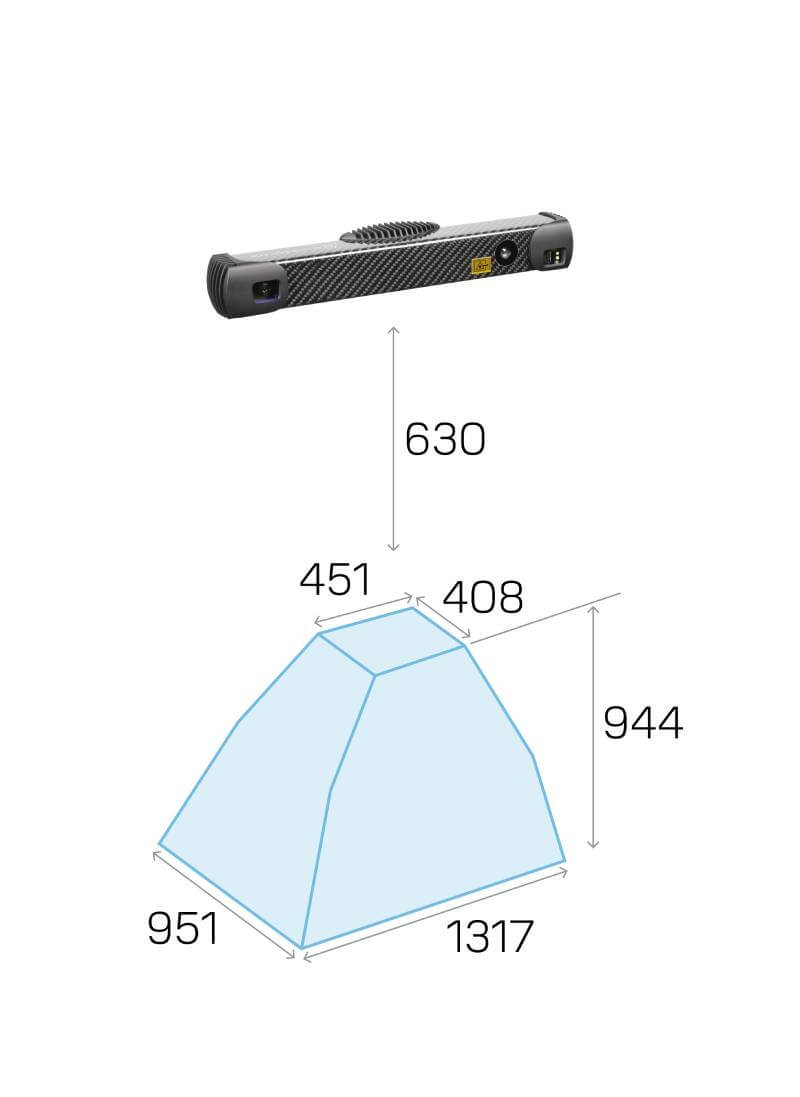
↑ Photoneo MotionCam-3D。動体対応・透明体対応の産業用ハイエンドカメラ(画像出典: Photoneo 公式)。本体だけで100万円超のレンジで、500万円パッケージの主役には予算的に厳しい。
Photoneo公式(photoneo.com)によれば、MotionCam-3Dは
- 最大20fps
- 最大40m/sの相対速度でも3Dデータを取得できる「動体対応」
- 主要用途は寸法測定、ハンドアイによる物体マニピュレーション、動体ピッキング、透明・半透明・光沢物
- 価格は公開されておらず、問い合わせ前提
性能は明確に上だが、本体だけで100万円を超えるレンジになるため、500万円パッケージで主役に据えるのは予算配分が厳しい。ZividやMech-Eye PRO Sも同じレンジ。これらは「PoCで顧客が露骨に高精度を求めてきたときの第二フェーズ用」と割り切る。
2.5 ハンドアイ校正
eye-in-hand(ロボ手先にカメラ)と eye-to-hand(固定設置)のいずれも、ArUco/AprilTag/Charucoマーカでtf2/hand_eye_calibration系のROS 2パッケージから流せる。ここはClaude Codeに書かせやすいレイヤ。手順とパッケージのglue、起動ファイル、キャリブ済み行列のYAML書き出しまで一式が定型化されている。
3. 協働ロボット本体の選び方
3.1 王道: UR(Universal Robots)
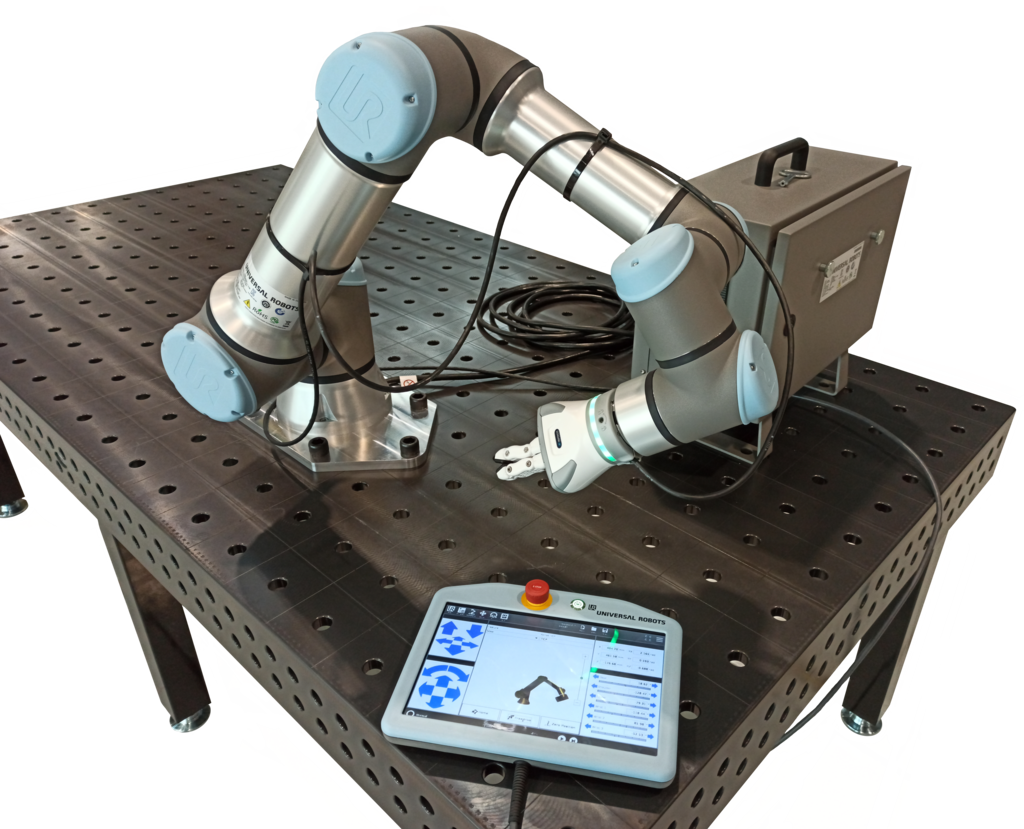
↑ Universal Robots UR16e。協働ロボの世界的デファクト。UR5eも同じ形状で可搬重量とリーチが違うバリエーション(画像出典: Wikimedia Commons — CC BY-SA 4.0)。
{kind=link}
UR3e/UR5e/UR10eは制御PCから流せるRTDEインタフェース、ROS 2ドライバUniversal_Robots_ROS2_Driverが公式メンテで、何より情報量が圧倒的に多い。本体は新品なら可搬3-5kg級で350-450万円(国内代理店)レンジ。500万円パッケージの主役にURを据えると本体だけで予算の大半を食う。
ただし、NVIDIA Isaac ROSのリファレンスワークフロー(Isaac Manipulator end-to-end tutorial)は実機UR5e + cuMotion + 検知モデルで組まれており、ROS 2 + cuMotion + UR5eは現時点で最もドキュメントが揃った構成。「PoCをまず動かす」のが最優先なら、UR5e中古や貸与で入れる手もある。
3.2 価格を半分以下にする: JAKA / Fairino / Dobot / AUBO
中国系コボットは同じ可搬重量でUR比 半額〜1/3 のレンジに収まる。本体写真はJAKA公式 Zuシリーズ、cobotaro 国内取扱(JAKA Zu7)、Misumi経由のFairinoで実物が確認できる。形状はURと近く、可搬重量5kg級・リーチ800mm前後・自重20-30kg程度。商社経由で買え、納期も2-6週間。optimax.co.jpのコボット価格比較記事を見ても、JAKA/Dobot/AUBO/Fairinoの可搬5kg級は本体100-180万円のレンジで動いている。
ROS 2対応では、JAKAがJakaCobot/jaka_ros2公式リポジトリ(github.com/JakaCobot/jaka_ros2)を出しており、ROS 2 Humble(Ubuntu 22.04 Jammy)に対応、zu3 / s5 / a12 / minicobo などをサポート、MoveIt 2(2.2以上推奨)統合済みでRVizのインタラクティブマーカーで軌跡計画・実行が可能、と明記されている。ROS 2でいきなり動かせる中国系の中ではJAKAが頭一つ抜けている。
注意点: 中国系のリスクは「サポートとスペアパーツが代理店依存」「ドキュメントが英中混在」「アフターで切り捨てられる代理店もある」。5年保守を約束できるかは契約前に必ず詰める。
3.3 国産: デンソーCOBOTTA Pro、川崎 duAro、三菱RVシリーズ
国産は本体が割高でROS 2ドライバが弱い(またはメーカ閉鎖環境)が、ユーザーが「日本メーカでないと稟議が通らない」ときの最終兵器。500万円に収めるなら、本体価格的にUR並みかそれ以上で、ハードのバランスが崩れる。提案書では「国産希望ならこの構成、コスト優先なら中国系」の二段組みで出すのが現実的。
3.4 軌跡生成・逆運動学を外に出せるか
500万円SIで利益を出すには「ティーチング工数を減らす」ことが要で、外部PCから軌跡を流せることは事実上の必須要件。UR(RTDE)、Franka(libfranka)、JAKA(jaka_ros2)、Fairino(SDK公開)、Doosan(Doosan Robotics ROS2)は外部PC制御の経路が確立している。ここを満たさないコボットは候補から外す。
4. エッジ計算: Jetsonを選ぶ
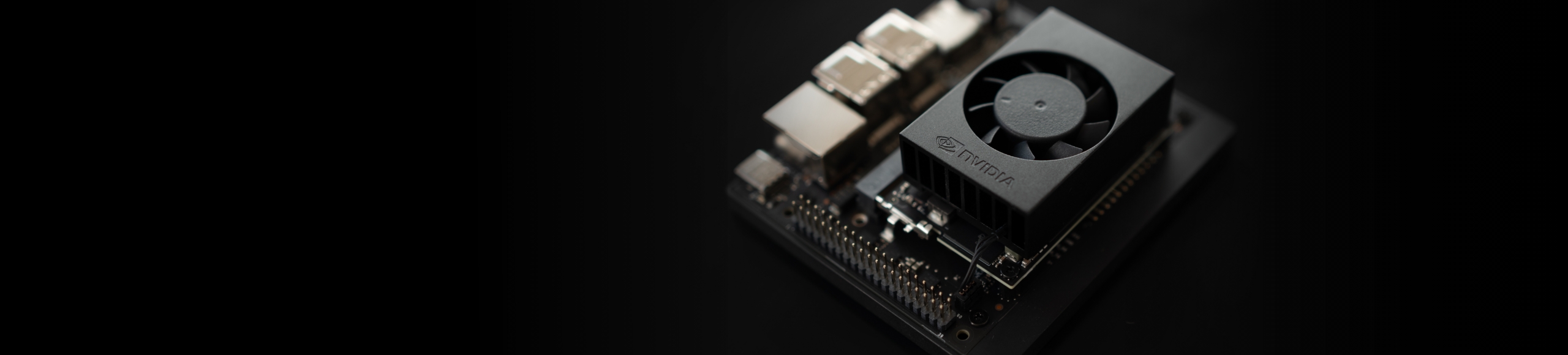
↑ NVIDIA Jetson Orin Nano Super Developer Kit。手のひらサイズのエッジAIコンピュータで、コボット制御・3Dカメラ処理・cuMotion軌跡計算をこの1台で回す(画像出典: NVIDIA 公式)。
4.1 SKUの位置取り(2026年6月時点)
| SKU | TOPS | メモリ | 想定用途 | 実勢価格 |
|---|---|---|---|---|
| Jetson Orin Nano Super | 67 TOPS | 8GB | PoC・小型検知 | 5-8万円 |
| Jetson Orin NX 16GB | 100 TOPS | 16GB | 6Dポーズ + cuMotion | 9-13万円 |
| Jetson AGX Orin 64GB | 275 TOPS | 64GB | VLAや複数モデル並列 | 25-35万円 |
| Jetson Thor (T5000) | 2070 FP4 TFLOPS | 128GB | GR00T級VLA・複数アーム | 50-70万円(開発キット) |
arXiv:2508.04146v2のcuRobo論文では、Jetson Orin NX(1024 CUDA cores, 8GB unified memory)でデスクトップRTX 4090の75%の性能を25W vs 400Wで達成と報告されている。500万円SIの本命はOrin NX 16GBに据える。Thorは性能は段違いだが価格と入手性で500万円パッケージにはまだ早い(「VLAをやる第二フェーズ」用)。
4.2 Jetson + 3Dカメラ + ROS 2 の現実
realsense-ros/depthai-ros(OAK-D) はJetsonでビルドして動く- ROS 2 Humble(Ubuntu 22.04)が現時点で最も枯れている。Jazzy対応はパッケージにより
- NVIDIA forumにはFoundationPose + 自前fine-tuneしたYOLOv8をJetson Orin AGXで動かすパイプライン記事がある。Orin AGX(275 TOPS)で実機動作までこなしている事例
Orin Nanoでも検知部分だけなら回るが、cuMotion + 検知 + 周辺ノードを全部Jetsonに載せるとOrin NX 16GBが事実上の最小ライン。
4.3 Thorが出てもOrinはまだ買う価値があるか
ある。Thorはまだ高価で在庫も限定的、ROS 2/cuMotion側のThor対応も「対応中」フェーズが多い。Orin系は枯れたソフト・サンプル・コミュニティが揃っている。500万円SIの実装本体はOrin NXで組み、Thorは「VLA案件 / 動体追従が必要な案件」が来てから検討で十分。
5. ソフトウェアスタック
5.1 検知レイヤ
| 役割 | 第一候補 | 代替 |
|---|---|---|
| 2D物体検出 | YOLOv8 / YOLOv10 fine-tune | Grounding DINO(ゼロショット) |
| セグメンテーション | SAM2 | SAM、Mask2Former |
| 6Dポーズ推定 | FoundationPose (NVIDIA, モデルレス) | MegaPose、GraspNet系 |
| マーカ検出 | ArUco / AprilTag | — |
FoundationPoseはCADモデル or 数枚のリファレンス画像だけで6Dポーズを推定でき、isaac_ros_foundationposeとしてJetson対応パッケージが提供されている。新規ワークごとに学習データを集める必要が薄く、SI工数を圧縮する効きが大きい。バラ積みは別途GraspNet系を併用する選択肢が残る。
5.2 軌跡生成: MoveIt 2 + cuMotion(cuRobo)
NVIDIA Isaac ROS公式ドキュメント(concepts/manipulation、isaac_ros_cumotion_moveit、GitHub isaac_ros_cumotion)によると、
- cuMotionはMoveIt 2用のmotion planning pluginとして提供される。標準のROS 2モーションプランニング・フレームワークにそのまま差し込める
- 内部で
cuRoboライブラリを利用し、NVIDIA Researchの技術を取り込んでいる - 公式サポートはUniversal Robots(UR10e)とFranka Panda。カスタムロボットはXRDF設定ファイルで対応
- Jetson Thorで秒未満、ディスクリートGPU(RTX 6000 Ada)で数十ミリ秒の軌跡計算性能
- CUDA加速で衝突回避軌跡を1秒未満で生成し、障害物の多いシーンで他プランナを上回る最適時間軌跡を出す
cuRobo論文(arXiv 2508.04146v2)でも、MoveItの約1200msに対して45ms前後で軌跡計画が完了し、CPUベースの主要手法より60倍高速、産業展開ではサイクルタイム28-35%削減・±10mmのワークずれに対し95%成功・ロボプログラミング工数60%削減、と報告されている。
500万円SIで「ティーチング工数を売価に組み入れずに利益を出す」ためには、cuMotion + MoveIt 2 + JetsonでJSEPの再ティーチングを最小化する設計が要。提案書のキラーフレーズもここに置ける。
5.3 シミュレーション: Isaac Sim or Gazebo
PoCフェーズはGazebo Harmonic + MoveIt 2でほぼ完結する。提案書用のキレイなデモ動画やワーク違いのバリエーション撮影が要るなら、Isaac Sim + Isaac Lab + Cosmos に上げる。最小モデルではGazebo、提案フェーズで顧客に映像を見せるならIsaac Sim、の役割分担。
5.4 VLA(Vision-Language-Action)とGR00Tの扱い
GR00Tは魅力的だが、現状は
- 推論にThor級GPU(または高性能ディスクリート)が事実上必須
- 産業向けのRobustnessはまだリサーチ段階
- 「自然言語で指示してロボが動く」を量産機でやり切るには検証コストが重い
500万円SIの主役にはまだ早い。第二弾の「800万円〜1200万円VLAパッケージ」として温める。第一弾(500万円)はFoundationPose + cuMotionでカチッと固める方が説得力もROIも出る。
6. Claude Code がどこを書くか
「Claude Codeを極めた人間がいれば作れる」というのは、Claude Codeに全レイヤを書かせるという意味ではない。実態は以下の役割分担になる。
| レイヤ | Claude Codeに書かせる範囲 | 人間がやる範囲 |
|---|---|---|
| ROS 2ノードのglue | ◎ 起動ファイル、QoS設定、tf2、トピック配線 | レビュー、トピック設計の判断 |
| 検知モデル統合 | ◎ pre/post処理、Triton経由の推論呼び出し、bbox→6Dポーズ変換 | モデル選定、ラベル設計、データ収集 |
| MoveIt/cuMotion設定 | ◎ XRDF/SRDF/コンフィグ、CollisionObjectの動的更新 | 安全範囲・速度制限の決定 |
| ハンドアイ校正 | ◎ 校正手順スクリプト、行列の保存・読込 | 治具設計、実機校正の段取り |
| SI個別の判定ロジック | ◎ ワーク種別判定、リジェクト基準、ログ出力 | 顧客ヒアリング、判定閾値の合意 |
| HMI / 監視UI | ◎ Vue/React + WebSocketでROS 2を可視化 | UX設計、現場オペレータ目線の調整 |
| 安全PLC / 配線 | × | 全部 |
| 機械設計・架台 | × | 全部 |
Claude Codeが効くのは「ROS 2ノードの量産」と「現場ごとにカスタムが要るglueコード」。逆に、機械設計・電装・安全PLCはClaude Codeでは代替できない。ロボSIerとしての価値の半分は、ここを物理で持っているかにある。Claude Codeを極めた個人が単独で500万円SIに参入する場合、機械・電装は協力会社を持っているか、コボット主体で配線を最小化する設計に逃げる、のいずれかが要る。
7. ユースケース別の収まり方
7.1 一番刺さるのは「視覚で位置補正するライト導入」
既存のティーチング型(教示済み軌跡を再生)のロボに、「ワーク位置がずれたら3Dカメラで補正する」だけのライト導入が最もROIが説明しやすい。
- 既存ラインを止めずに導入できる
- 「補正前 vs 補正後」で歩留まり改善が数値で出る
- 500万円のうち、ロボ本体は既存流用 → カメラ/Jetson/SI工数で済むケースもある
7.2 多品種少量のピック&プレース
段ボール、ブリスター、不定形ワーク。FoundationPose + cuMotionが一番効く帯域。サイクルタイム要件が緩い(2-5秒/個)現場なら、Orin NX 16GBでも回る。
7.3 検査(表面・3D・寸法)
これは「ロボ要らないでしょ?」のケースもあり、カメラ + Jetsonだけで300万円パッケージとして別商品にした方が刺さる。500万円パッケージは「動かす」が主役。
7.4 パレタイズ/デパレタイズ
可搬重量と段数で本体クラスが上がる(UR10e or Doosan H系)ため、500万円ギリギリのラインに乗る。FOVが広いOrbbec/Femto Boltが効く。
7.5 バラ積みピッキング(ビンピッキング)
ここはMujinが圧倒的に強い領域。Mujin公式(mujin.co.jp/solution/fa/picking)によると、PickWorkerはランダム積みの「ティーチレス」ピッキング、Mujin Controller + 自社Mujin Vision 3D(レーザLED 3Dビジョン)、10社超のロボメーカ対応、購入前のシミュレーション能力保証、衝突ゼロの経路計画、自社「MujinMI」によるチョコ停ゼロ志向。正面からは戦わない方がいい。500万円SIは「Mujinが入らない小さい現場」「単一ワーク・低頻度」「予算が完全に違う層」を狙う。
8. 最小モデル(PoC)の推奨BOMと費用感
社内ラボで1〜2週間で組める、かつ顧客にデモできる最小ハードウェア構成。
8.1 推奨BOM(税抜・実勢ベース)
| 項目 | 型番 | 数量 | 概算 |
|---|---|---|---|
| 協働ロボ本体 | JAKA Zu5 または UR3e中古 | 1 | 100〜180万円 |
| 3Dカメラ | Intel RealSense D435i | 1 | 7万円 |
| カメラ予備/比較用 | Luxonis OAK-D Pro | 1 | 10万円 |
| エッジ計算 | Jetson Orin NX 16GB 開発キット | 1 | 11万円 |
| エンドエフェクタ | 真空吸着パッド + ガスエジェクタ | 1式 | 8万円 |
| 制御PC | Mini-ITXワークステーション(Ryzen + RTX) | 1 | 25万円 |
| 架台・治具 | アルミフレーム + デモワーク | 1式 | 15万円 |
| ケーブル・配線 | PoE Switch、産業用LAN、電源 | 1式 | 6万円 |
| 合計 | 約182〜262万円 |
8.2 想定デモ
3段階で組むと「これなら500万円出します」と言わせやすい。
- Lv.1 (1週目): 机上のブロックをRealSenseで検出→FoundationPoseで6Dポーズ→cuMotion経由でMoveIt 2 → JAKA/URで掴んで指定位置に置く。
- Lv.2 (2週目): 5種類の不定形ワークが混在するトレーから、指定種別だけを順にピック。検知失敗時はリトライしてログに残す。
- Lv.3 (顧客現場の3-4週目): 顧客のワークサンプル数十個をFoundationPoseに登録 → 現場ラインの一部に組み込んでサイクルタイム計測 → 「補正なし vs あり」を数値で比較。
PoCのソフト工数(Claude Codeに書かせる前提)で、Lv.1 まで3-5人日、Lv.2 まで10-15人日、Lv.3 で20-30人日が体感レンジ。
8.3 量産機までの工数感
PoC合意 → 詳細設計 → 製作 → 据付 → 立ち合い → 検収 で3-5ヶ月。SIerが2-3人月、機械協力会社が1-2人月、電装が0.5-1人月。500万円のうち粗利を残せる構造になっているかは、Claude Codeで圧縮できる「SIソフト工数」の比率次第。
9. 補助金で顧客の実質負担を圧縮する
中小企業省力化投資補助金(一般型)の公式(shoryokuka.smrj.go.jp/ippan)によると、
- 補助上限額: 従業員5人以下で750万円(賃上げ達成時1,000万円)
- 補助率: 中小企業 1/2(賃上げ達成時 2/3)、小規模企業者 2/3
- 500万円パッケージなら顧客の実質負担は167万円〜250万円まで圧縮可能
ものづくり補助金、IT導入補助金とも併走できる年度が多く、SIer側で補助金申請の支援(または提携行政書士)まで持っていけると、提案書の説得力が一段上がる。「補助金前提の見積もり書」をテンプレ化しておくのは、Claude Codeに書かせやすい仕事のひとつ。
補助金は年度ごとに枠・要件が変わる。提案時点での最新公募要領を必ず確認すること。本記事は公開時点の制度を前提に書いている。
10. 法規制と安全規格(見落とすと痛い)
協働ロボSIで現場の安全側を詰めるとき、最低限抑える規格を整理する(参考: factory-dx-center.com など)。
- ISO 10218-1/2: 産業用ロボットの安全要求
- ISO/TS 15066: 協働運転モード(出力・速度制限の数値基準)
- JIS B 8433: ISOの邦訳
- 労働安全衛生規則 第150条の4: 一定条件下で柵不要(80W以下等)
- リスクアセスメント: 規格より先に「ここで人が挟まれたら何が起きるか」を出す
500万円で売る場合、労安衛規則150条の4の条件を満たす設計に振る(出力80W以下・接触力ISO/TS 15066準拠)と、安全柵なしで提案できるためコストが大きく下がる。逆に可搬5-10kgで安全柵が要る案件は、柵の機械設計だけで30-80万円が乗る。提案の早い段階で「柵あり前提か、柵なし前提か」を顧客と握る。
11. 既存パッケージSIとの差別化
| 競合 | 価格帯 | 強み | 500万円SIの戦い方 |
|---|---|---|---|
| Mujin | 1000万〜数億円 | バラ積み・大規模パレタイズ | 「Mujinが入らない小さい現場」を狙う |
| RightHand Robotics / Pickit | 500万〜1500万円 | 既製パッケージ・カメラ込み | 「日本語サポート + 現場常駐」で勝つ |
| 三菱/ファナック系SIer | 500万〜2000万円 | 既存ラインとの統合・国産安心感 | 「コボット + AI検知」のとがった構成で差別化 |
| 大手SIer | 1000万円〜 | 工場全体の上流設計 | 単機の「視覚補正ライト導入」で食い込む |
「Mujinが正面から相手にしない小さい現場」「大手SIerの最小単価より下」「中堅SIerより親身に話を聞く」のラインに収まる案件は、想像以上に多い。冒頭の現場観察(「冷たい会社が多い・分かりやすい言葉で親身に対応するだけで決まる」)は、業界レポートで定量的に裏取りできるものではないが、問い合わせから初回訪問までのリードタイムを24時間以内、最初の打ち合わせをロボの専門用語を使わずに進める、だけでも一次面談の通過率は実感として上がる(これは著者の仮説)。
12. 中国系コボットのリスクと折り合い
- スペアパーツ: 国内代理店が在庫を持っているか、本国直送で何日かかるかを契約前に確認
- 5年保守の継続性: 代理店が撤退するケースを想定し、別代理店経由の保守転送が可能か
- ドキュメント: 英中混在は前提。SIer側で日本語マニュアルを巻き直す工数を見積もりに入れる
- コンプライアンス: 顧客の業界(防衛・金融機関工場等)によっては中国系を選べない。提案時にヒアリング
これらを「リスクとして開示しつつ、価格半額のメリットで上回る」提案を出すのが王道。「中国系不可」の顧客にはUR + Jetson + RealSense構成を別見積もりで持っていくだけで失注を防げる。
13. 個人参入の現実解 — 売価500万円 ≠ 参入コスト500万円
13.0 大事な前提: 売価と参入コストは別物
「500万円パッケージを売っている」という現場の話を聞くと、500万円分の投資が要る事業のように錯覚しがちだが、そうではない。
- 売価 500万円 = 顧客に提供するパッケージの値段(ハード + 据付 + SI工数 + 保証)
- SIer側の参入コスト = 自分のラボ用ハード + デモ環境構築費 + 学習時間
§8で書いた「PoCの推奨BOM 182-262万円」が、この参入コストに該当する。200万円前後のラボ設備で動くデモが作れれば、500万円の案件を取りに行ける——これが「もっと安く参入できる」と言っていた人の主張の筋だと思う。Jetson + RealSense + 中古コボット + cuMotion で手元のデモが動く状態を作ること自体は、Claude Codeで時間を圧縮すれば1人でも届くレンジ。
ただし、ここから先「事業として継続できるか」は別問題で、構造的に重い課題が残る。以下、それを正直に整理する。
13.1 個人で事業継続が詰む5つの構造
13.1 個人が詰む5つの構造
(1) 機械・電装・安全責任を個人が持てない
安全柵・治具・配線・安全PLCは物理の世界で、Claude Codeでは代替できない。労安衛規則150条の4でロボ出力80W超なら柵設計の責任が要る。装置で人が怪我したときのPL法上の責任を個人事業主が10年抱えるのは現実的でない。
(2) キャッシュフローが地獄
1案件3-5ヶ月、検収後支払い、500万円のうち実粗利は100-200万円。年5-10件回さないと食えないが、PoC段階で失注も多い。ハードを先に仕入れる場合、運転資金で詰む。
(3) 「冷たい会社が多い」の裏側
既存SIerが冷たいのは儲からない案件を断っているからでもある。500万円帯は「親身に対応する余力がない案件」の代名詞で、決まった後の保守工数で利益が消えるケースが多い。
(4) 顧客現場の再現性が低い
ワークが毎回違う、光・温度・湿度・粉塵が違う、ライン速度が違う。ラボで動いたものが現場で動かないのは普通で、FoundationPoseもcuMotionも現場調整工数を消してくれない。
(5) 中国系コボットの長期保守責任
5年後に代理店が撤退したらスペアが入らない。顧客から「中国系で安く入れた」装置の保守を10年責められる構造を、個人が抱え続けるのはきつい。
13.2 個人の現実的な入り方は段階的
参入コストが200万円台で済むとはいえ、いきなり「個人で500万円ハードSI事業を立ち上げる」のは構造的に重い。レイヤを分けて、段階的に入る道のほうが現実的。
| 形態 | 売価レンジ | 個人参入の現実性 |
|---|---|---|
| (A) 既存ロボSIerのサブコン | 月40-80万円 | ◎ 機械・電装はSIer持ち、AI/3D検知だけ受託 |
| (B) PoC実証専門 | 100-200万円/件 | ○ 500万円本番ではなく「動く可能性の検証」だけ請ける |
| (C) 検査機特化 | 200-400万円/件 | ◎ ロボを外して安全責任が桁違いに軽い |
| (D) 個別案件のグルーコード | 月40-80万円常駐/リモート | ○ Claude Codeのレバレッジが一番効く |
13.3 一番現実的なのは「検査機特化」
(C)の検査機特化は、ロボットを売らない選択肢。
- 3Dカメラ + Jetson + 学習済みモデル(YOLO/SAM2)で「不良品検知」「寸法測定」「3D形状検査」の装置だけを作る
- 売価200-400万円、ハード原価50-100万円、SI工数100-150万円、粗利率30-40%
- 動作するのはカメラとPCだけなので、PL法上のリスクが桁違いに軽い
- 安全柵・安全PLC・配線が要らない → 個人でも完結する
- 中小工場の検査工程は人手不足が深刻 → 営業しやすい
- 税理士・会計士コミュニティの顧客(中小製造業)に直販できる規模感
Claude Codeとの相性も最良で、検知モデルの統合・判定ロジック・現場別のUI/帳票出力をすべてAIで書ける。個人参入の現実解はここ。
13.4 (A)サブコン路線も現実的
機械SIerは「AI/3D検知の中身を理解している人間が社内にいない」という不足を抱えていることが多い。Claude Codeで実装速度を出せる個人が、機械SIerのプロジェクトに「AI担当」として月40-80万円で常駐/リモートで入る形は、リスクが低く即効性がある。500万円SI事業を1人で立ち上げる前に、まずここで業界の構造とコネクションを得るのが正攻法。
14. 結論: 個人なら検査機300万円、法人ならOrin NX + RealSense + JAKA(or 中古UR) + cuMotion
法人(機械・電装の協力会社を持つ小規模SIer)の場合:
- ハード: Jetson Orin NX 16GB + RealSense D435i + JAKA Zu5(または中古UR3e/UR5e) + 真空ハンド + アルミ架台
- ソフト: ROS 2 Humble + MoveIt 2 + cuMotion(cuRobo) + FoundationPose + Triton
- デモ: 6Dポーズ推定→cuMotion経路計算→ピック&プレース、を1-2週間で実装
- 営業: 補助金前提の見積もり + 24時間以内の初回返信 + 専門用語を抜いた一次面談
- 拡張: 案件が複数走り出したらThor/VLAの第二弾パッケージを温める
個人事業主の場合:
- まず 既存ロボSIerのサブコン or 検査機専門 で業界に入る
- 検査機(3Dカメラ + Jetson + 検知モデル)で売価200-400万円のパッケージを作る(ロボは売らない)
- 税理士・会計士の顧客ネットワーク経由で中小工場に直販する
- 案件を回しながら機械・電装の協力会社を見つける
- 協力会社が固まったら、初めて500万円ロボSIに踏み込む
「Claude Codeを極めた個人が3Dカメラ × コボット × Jetson で参入する」道は、参入コスト自体は200万円台で届く。そこは「もっと安く参入できる」という現場の声と一致する。問題は売価500万円の案件を継続的に回せる体制を作れるかで、機械・電装の協力会社、安全責任、長期保守の確保が要る。だからこそ、いきなり500万円ハードSIに行くより、まず検査機(売価200-400万円)やサブコンでキャッシュフローと業界知見を作り、協力会社が固まってから500万円帯に踏み込むのが、個人参入の現実的な順番。Mujinが正面から相手にしない帯域に「お得なレンジが残っている」のは事実で、そこに辿り着くまでの2-3年の道筋を、いま手元のラボから引いておくことが、現場観察と公開情報を突き合わせた率直な結論。
参考文献(主要なものに限る)
3Dカメラ
- Intel RealSense D435i 公式仕様
- Photoneo MotionCam-3D 公式
- Orbbec Gemini 2 vs Intel RealSense D435 比較
- Best Depth Cameras for Robotics (Robotics Center)
協働ロボット / ROS 2
- JAKA jaka_ros2 公式リポジトリ
- cobotaro JAKA Zu7
- Misumi Fairino 取扱
- optimax.co.jp コボット価格比較
- Top Cobot Manufacturers 2026 (EVS International)
- techshare Dobot 取扱
NVIDIA Isaac ROS / cuMotion
- NVIDIA Isaac ROS Manipulation Concepts
- isaac_ros_cumotion_moveit 公式
- isaac_ros_cumotion GitHub
- Isaac Manipulator End-to-End Tutorial (UR5e + cuMotion)
- FoundationPose + YOLOv8 on Jetson Orin AGX (NVIDIA Forum)
- cuRobo: GPU-Accelerated Motion Planning (arXiv 2508.04146v2)
既存パッケージSI
補助金・法規制
本記事の調査は、Claude Codeのディープリサーチ機能(WebSearch × 5並列 → Fetch × 25ソース → claim抽出 × 103件)で集めた素材をベースに、著者(税理士・会計士コミュニティ寄りのフリーランス開発者)の現場観察を重ねて書いた仮説整理。価格レンジや工数感は時期と為替で動くため、最終的な選定は各メーカーの一次資料と最新の補助金公募要領を確認すること。